
Американські вчені розробили технологію створення еластичних актуаторів («сухожилля» роботів) з нейлону. Результати дослідження опубліковані в журналі Advanced Materials.
Актуатори – універсальні виконавчі пристрої, які можуть управлятися за допомогою пульта. Вони розглядаються як основа штучних м’язів роботів, і, оскільки традиційні гідравлічні системи є громіздкими, вчені шукають способи створювати актуатори з еластичних матеріалів, наприклад полімерів. В даний час штучні м’язи на базі полімерів, як правило, можуть скорочуватися, але не згинатися. Крім того, їх виробництво, зокрема на основі вуглецевих нанотрубок, є дорогим.
Альтернативою може являються орієнтований нейлон. При нагріванні цей матеріал поводиться як м’язові волокна: скорочується і збільшує свій об’єм. Раніше дослідники вже експериментували з лінійними актуаторами на основі нейлону, але такі м’язи тільки скорочувалися або розтягувалися. У новій роботі вчені з Массачусетського технологічного інституту використовували нейлонові нитки з прямокутним перетином, спресувавши звичайну рибальську волосінь. Потім її точково нагрівали з різних сторін.
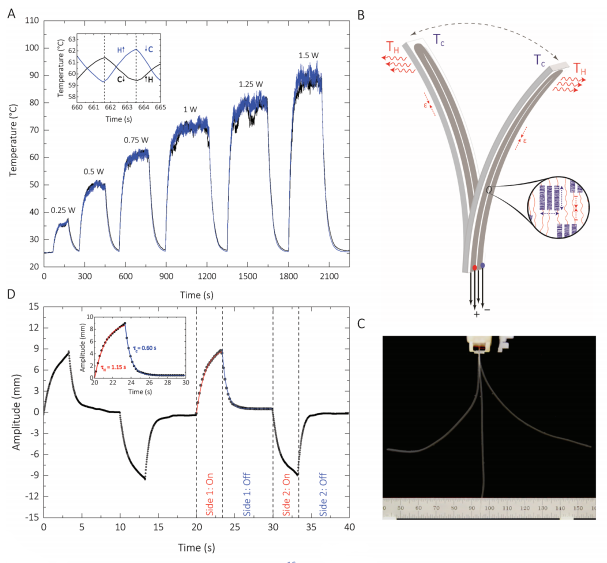
Випробування показали, що при такому нагріванні актуатор може скорочуватися з одного боку швидше, ніж з іншого, і згинатися в потрібному напрямку. Ресурс актуатора склав до 100 тисяч циклів згинання, що в сто разів перевищує показник вуглецевих нанотрубок. Частота згинань-розгинань пристрою може досягати 17 циклів в секунду. При цьому для нагрівання можна використовувати лазер або струмопровідну фарбу з графеном, нанесену на певні ділянки штучних м’язів. Це дозволить актуатора виконувати навіть складні рухи.
Leave a Reply
Щоб відправити коментар вам необхідно авторизуватись.